
Project information
- Category: Robotics and AI
- Project date: 3 Mar, 2020
- Project GitHub: Code
Project description
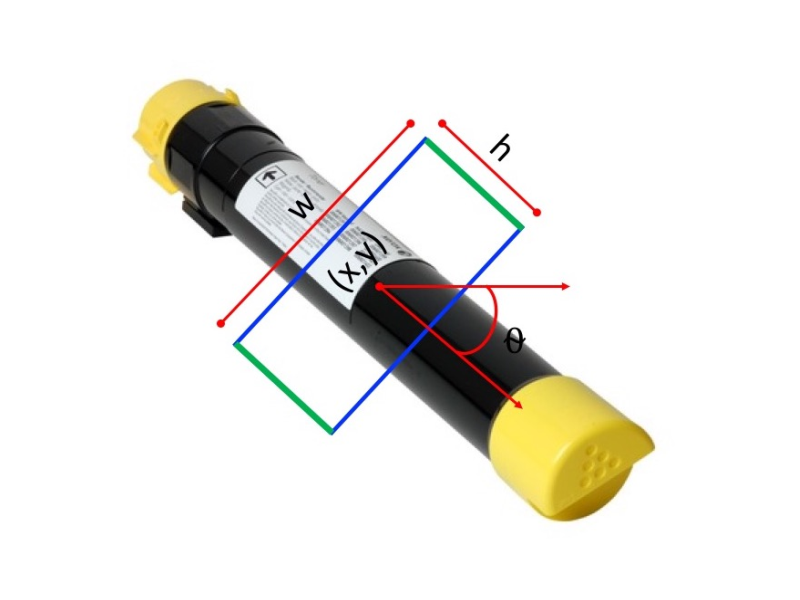
This project investigates several approaches for the detection of graspable areas of an object. In particular, two Resnet-50 and two ResNet-18 models are trained with different configurations. The models are trained on the Cornell Grasping Dataset.